
Nvidia has announced an Isaac GR00T blueprint to accelerate humanoid robotics development.
At Nvidia CEO Jensen Huang’s CES 2025 keynote, Huang said that Isaac GR00T workflows for synthetic data and Nvidia Cosmos world foundation models will supercharge development of general humanoid robots.
Robots on the march
Over the next two decades, the market for humanoid robots is expected to reach $38 billion. To address this significant demand, particularly in the industrial and manufacturing sectors, Nvidia is releasing a collection of robot foundation models, data pipelines and simulation frameworks to accelerate next-generation humanoid robot development.
The Nvidia Isaac GR00T blueprint for synthetic motion generation helps developers generate exponentially large synthetic motion data to train their humanoids using imitation learning.
Imitation learning — a subset of robot learning — enables humanoids to acquire new skills by observing and mimicking expert human demonstrations. Collecting these extensive, high-quality datasets in the real world is tedious, time-consuming and often prohibitively expensive.
Implementing the Isaac GR00T blueprint for synthetic motion generation allows developers to easily generate exponentially large synthetic datasets from just a small number of human demonstrations.
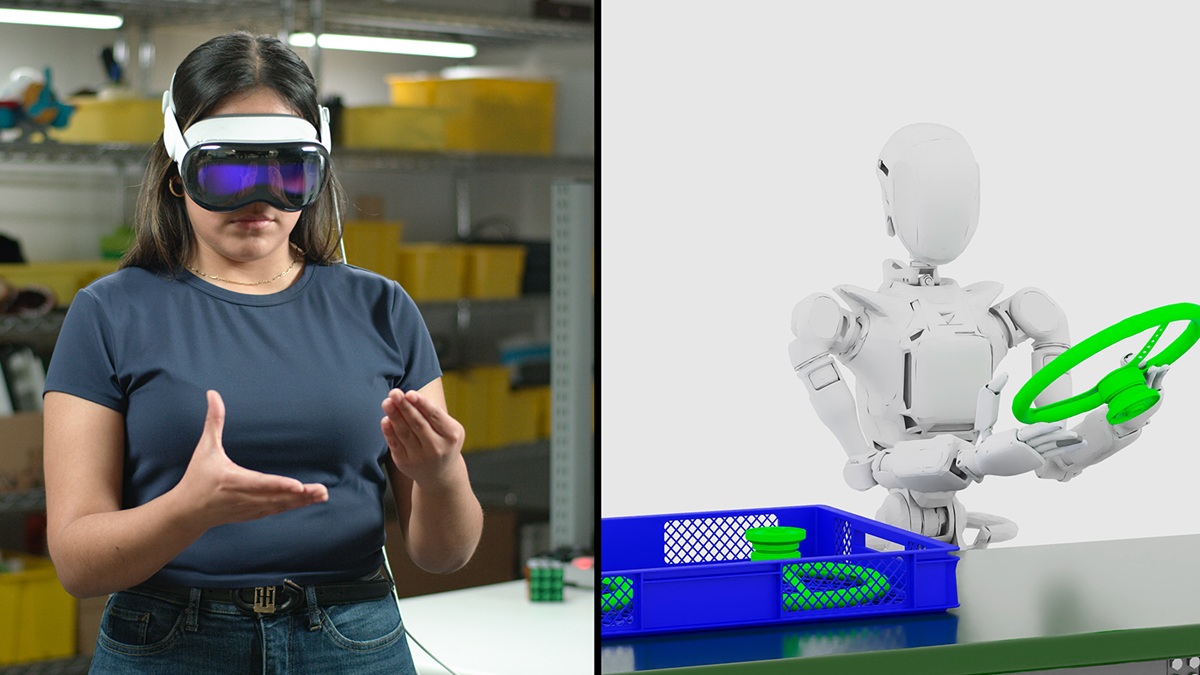
Starting with the GR00T-Teleop workflow, users can tap into Apple Vision Pro to capture human actions in a digital twin. These human actions are mimicked by a robot in simulation and recorded for use as ground truth.
The GR00T-Mimic workflow then multiplies the captured human demonstration into a larger synthetic motion dataset. Finally, the GR00T-Gen workflow, built on the Nvidia Omniverse and Nvidia Cosmos platforms, exponentially expands this dataset through domain randomization and 3D upscaling.
The dataset can then be used as an input to the robot policy, which teaches robots how to move and interact with their environment effectively and safely in Nvidia Isaac Lab, an open-source and modular framework for robot learning.
World foundation models narrow the sim-to-real gap

Also at CES, Nvidia announced Cosmos, a platform featuring a family of open, pretrained world foundation models purpose-built for generating physics-aware videos and world states for physical AI development. It includes autoregressive and diffusion models in a variety of sizes and input-data formats. The models were trained on 18 quadrillion tokens, including 2 million hours of autonomous driving, robotics, drone footage and synthetic data.
In addition to helping generate large datasets, Cosmos can reduce the simulation-to-real gap by upscaling images from 3D to real. Combining Omniverse — a developer platform of application programming interfaces and microservices for building 3D applications and services — with Cosmos is critical, because it helps minimize potential hallucinations commonly associated with world models by providing crucial safeguards through its highly controllable, physically accurate simulations.
An expanding ecosystem

Collectively, Nvidia Isaac GR00T, Omniverse and Cosmos are helping physical AI and humanoid innovation take a giant leap forward. Major robotics companies including Boston Dynamics and Figure have started adopting and demonstrating results with Isaac GR00T.
Humanoid software, hardware and robot manufacturers can apply for early access to Nvidia’s humanoid robot developer program.